I wanted to show some of the different equipment we’ll be using for the 3D Laser Scanne
Here is the PS3 camera – I haven’t modified it at all. I did download the drivers (see yesterdays post) so that it would run on my PC (well Windows running on Parallels).

Here are the three lasers that I have. The top left one is from an Army swag pen that I took apart about 5 years ago. The bottom left is one that I had when I was in Iraq… both have the original coin cell batteries. The one on the right is self explanatory and will be the one I use for testing.

The Black&Decker laser level has three positions for the lasers. One on each side and one on the top. There is a button on each side to switch the laser level to reflect out of each of the three sections. I will be using the one at the top and the level mounted sideways to run the tests.
As you can see from the pictures below, if the laser level is resting flat on it’s back, the laser line is vertical. If the laser level is on its side, then the laser line is horizontal. Both are seen on the DAVID laser scanner calibration papers that I still need to put on boards so I can do the tests.

The Cylon Eye test

Here is a screenshot of the PS3 Camera on Windows running in Parallels on my Mac
Here is a photo of the DAVID software on Windows running in Parallels on my Mac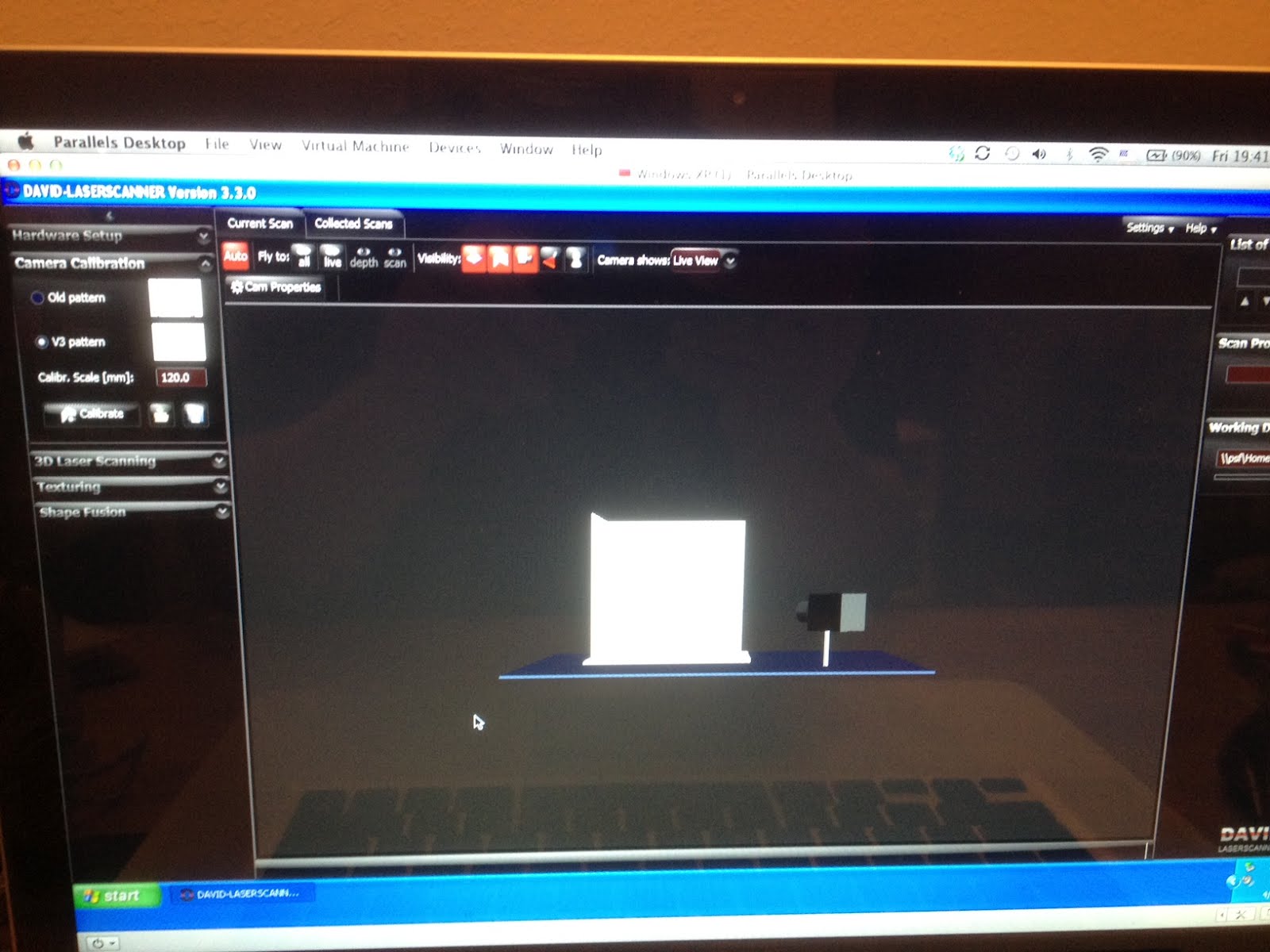
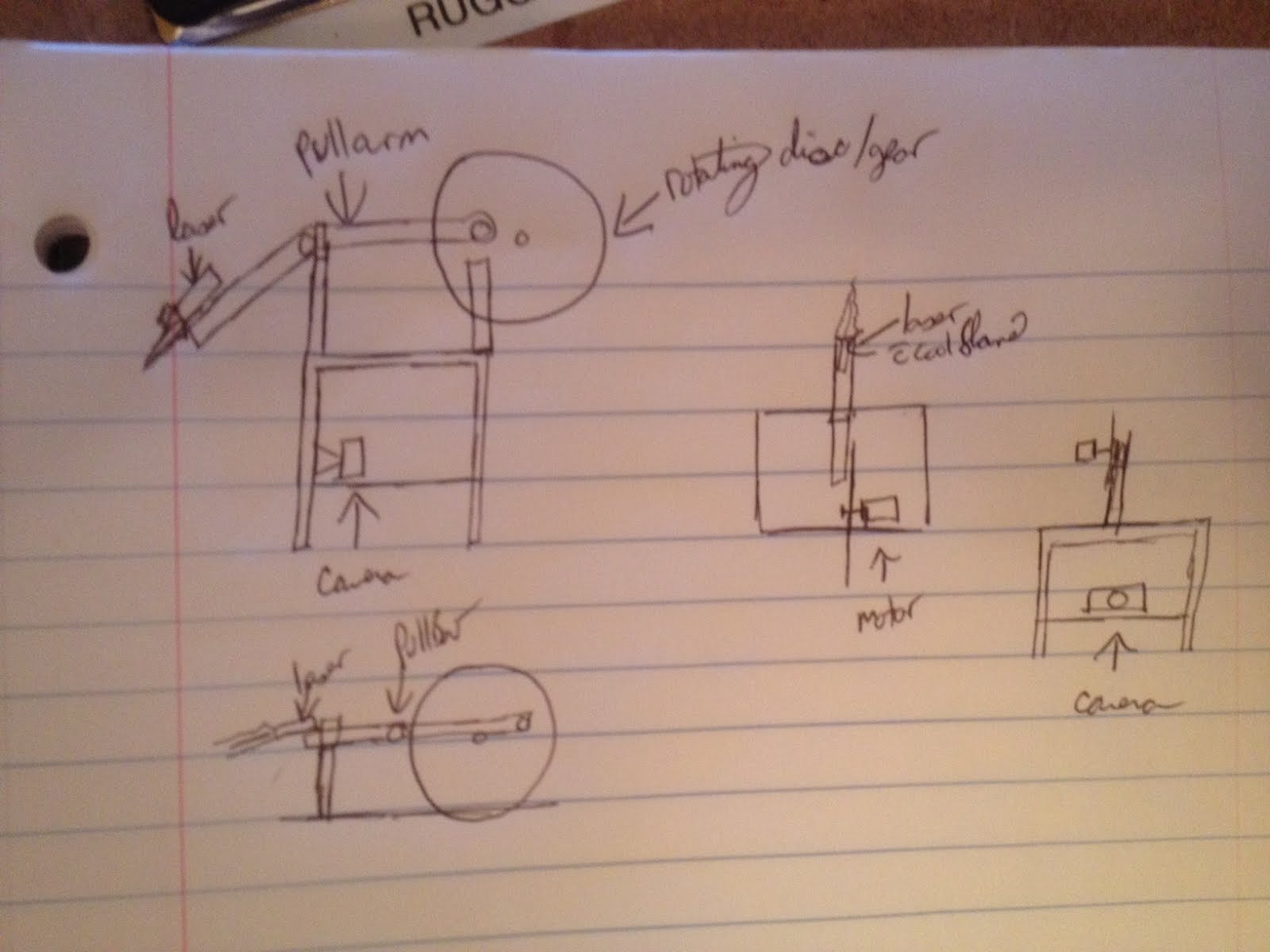
Here are my thoughts on the rig that I want to build. The laser needs to move up and down across objects slowly and many times. I’m thinking that my arms can barely hold up my fingers for long periods of time, so I’ll need something. My first idea was to have a motor turning a wheel at some rate (TBD). Attached to one edge of this wheel is a pull bar with a hinge in it. As the pull bar is extended out it will move down. As the pull bar is pulled back it will move up. The problem with this design is that the laser will not be at the same position only rotating up and down…it will be at various positions. I need to do more research to find a way to achieve this same result without moving the laser out of its original position so much.