Osiyo. Dohiju? Hey, welcome back.
I am at a point that I am way more than satisfied with the work that has happened with Serinda. I was reading everything I could last night about so many technologies. At like 5am or 6am I started up Triton and tested the LeapMotion. I took a few photos of the current rig. Here are just some of the photos from today. I didn’t realize the video I did the other day was 47 minutes long and is probably quite boring to most. I’m going to go ahead and upload it even with the silent part; then I’ll record a new video for the file structure.
I’m also re-evaluating my codebase. I went with Python3 for the biggest reason that I’ve been using OpenCV with Python for a long time and I have a lot of code I’ve gleaned and written over the years (thanks Adrian from PyImageSearch for inspiration). However, if I could use Javascript and not tax the processor as much that’d be ok. I’ve already got the code I used for connecting cameras via websockets. I don’t really know. I have a lot of thinking to do. I’m too tired to think.
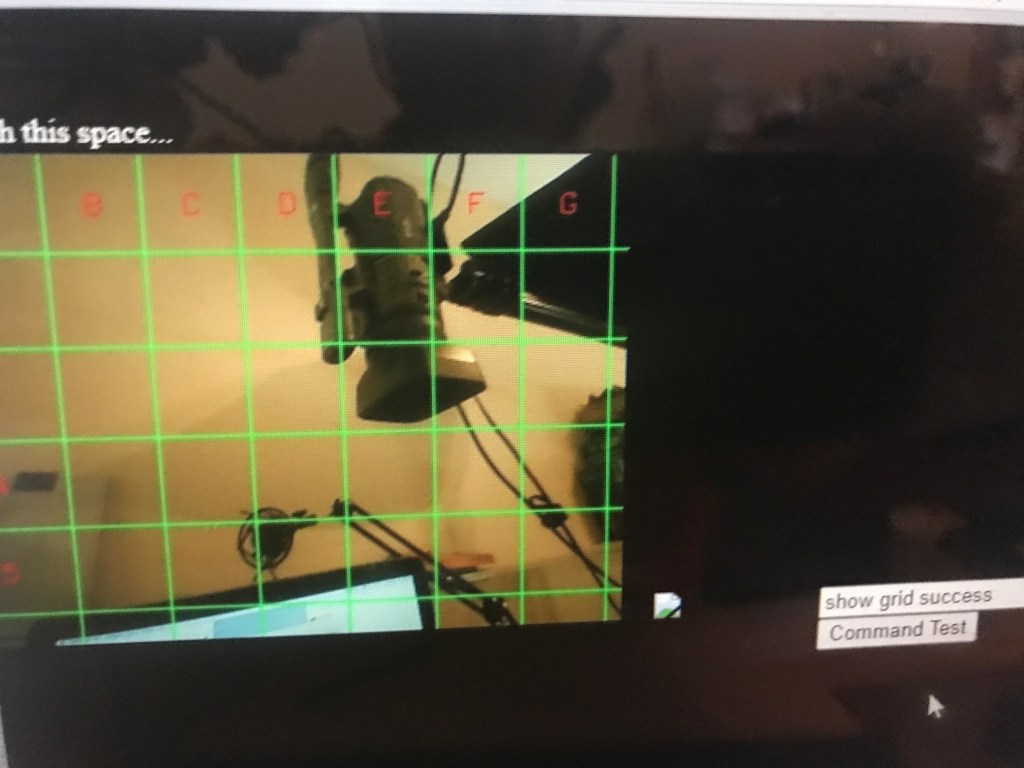
The images below – starting the top left and then across top to bottom. The first three pics are the HoloKit with the LattePanda on top and you can see the LeapMotion on the front. I didn’t show the TFT inside the front of the HoloKit, but you’ll be able to see it as I go on. The 4th photo is a shot of Triton running on the LattePanda so I could make sure it works before I move on to what I’m going to do. A top view of the LattePanda. I wish there were better ways with the cabling. And the heat is insane. The fan stopped working. I’ll have to mount a heat sink at some point. The next photo is of my Mac screen while the camera is pointed at my overhead camera for vlogging and streaming. Then 2 shots of the view of the same – with the grid pattern so I can tell it where to track objects. I show the timestamp overlay then the tracking marker which when I move my hand the marker follows. And finally the Chinese-made headset that is very similar to the one Triton uses. Of note, when I’m testing the OpenCV portions I do use the camera view in the headset. When I want to test it as Augmented Reality I make the frame black for the display only showing the grid or the tracking marker or the timestamp, etc.
Until next time. Dodadagohvi.